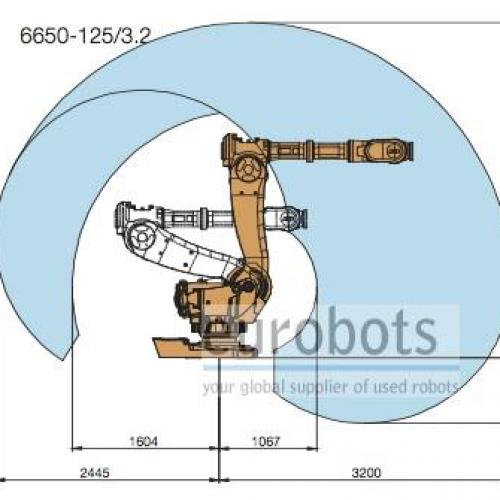
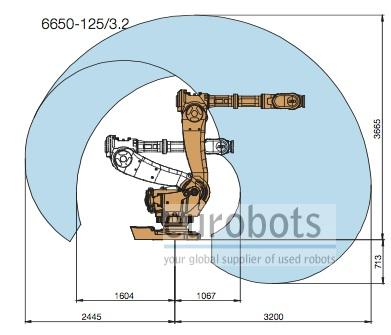
Popüler 6600 Arm uzun kol versiyonu 3200 mm ve 1320 Nm tork bir bilek yukarı kadar ulaşır. Ünlü IRB6400 evrimi. Yüksek hız ve Kuka ve Fanuc felsefesi (Kuka serisi 2000 ve Fanuc R2000) Aşağıdaki eksen 2 ve 3. Tek yay denge sisteminde daha geniş bir çalışma zarfı sağlayan tamamen yeni bir şekil. IRB 6600 kolay planı servis ve bakım bunun için izin yerleşik bir Servis Bilgi Sistemi ile birlikte gelir.
En son IRC5 kontrolör ile donatılmıştır.
IRC5 ABB'nin beşinci nesil robot kontrol olduğunu. Onun hareket kontrol teknolojisi, TrueMove & QuickMove, harici cihazlar ile doğruluk, hız, devir-zaman, programlanabilirlik ve senkronizasyon açısından robotun performansı anahtarıdır.
Gelişmiş dinamik modellemeye dayalı, IRC5 fiziksel mümkün olan en kısa döngü süresi (QuickMove) ve hassas yol doğruluk (TrueMove) için robotun performansını optimize eder. Birlikte hız bağımsız yolu, öngörülebilir ve yüksek performanslı davranış programcı tarafından gerekli hiçbir ayar ile, otomatik olarak teslim edilir.
HIZLI programlama dili
Basitlik, esneklik ve powerful- lık mükemmel kombinasyonu. HIZLI gelişmiş özellikleri ve birçok işlem uygulamaları için güçlü destek bilgisayarlar ile gerçekten sınırsız bir dildir.
İletişim
IRC5 G / Ç için state-of-the-art alan otobüslerde destekler ve herhangi bir bitki ağdaki bir uslu düğümdür. Sensör arayüzleri, uzaktan disk erişimi ve soket mesajlaşma birçok güçlü ağ özellikleri örnekleridir.
robot Bilgisi
Robot • Maksimum Yük: 125 Kg
• Maksimum Erişim: 3200 mm
• Tekrarlanabilirlik: 0.1 mm
• Denetleyici: IRC5 M2004
Robot hareket hızı
• Eksen 1: 110º / sn
• Eksen 2: 90º / sn
• Eksen 3: 90º / sn
• Eksen 4: 150º / sn
• Eksen 5: 120º / sn
• Eksen 6: 235º / sn
Uygulamalar
• Spot kaynak
• Basın arkalığa
• Malzeme taşıma
• Makine arkalığa
• Paletleme
• Montaj
• Yapıştırma ve yapıştırma
• Plazma Kesme
• İşleme
Applications
Basın desteği , Paletleme , Parçaların yüklenmesi ve boşaltılması , Talaşlı imalat , Parçaların taşınması , Yapıştırma - Yapıştırıcı bağlama , Plazma kesim





{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}